Подво́дная робототе́хника, как и робототехника вообще[1], — это наука и практика проектирования, производства и, в данном случае, применения роботов в подводной среде.
Что такое подводный робот?
Подводными роботами принято называть:
- телеуправляемые необитаемые подводные аппараты (ТНПА);
- автономные необитаемые подводные аппараты (АНПА);
- глайдеры (подводный планер);
- дрейфующие буи-измерители (например, Арго);
- буксируемые и донные комплексы.
Уже в конце 1970-х гг., в понятие «подводный робот» вкладывалось нечто отличающееся от понятий «машина», «механизм», «автоматическая система». Тогда считалось, что: «Подводный робот — это кибернетическое комплексное устройство, имеющее внутреннюю память и самостоятельно ориентирующееся в окружающей обстановке». Согласно современному определению[2] робот должен обладать определённой подвижностью и степенью (уровнем) автономности. Из эксплуатируемых сейчас изделий, наиболее автономными, то есть способными выполнять задачи по назначению на основе текущего состояния и восприятия внешней среды без вмешательства человека[3], являются дрейфующие буи-измерители. ТНПА наименее автономны и управляются операторами в реальном времени посредством телеуправления. АНПА передвигаются под своим собственным управлением, в соответствии с программой-заданием, подготовленной заранее, но с постоянным контролем операторами позиции, параметров движения и режима работы полезной нагрузки. Оператор может вмешаться в ход исполнения программы-задания, давать команды по беспроводному каналу связи, чаще всего, гидроакустическому.
Подводные роботы часто относятся к мобильным, однако среди действующих[4] международных и разрабатываемых российских стандартов (на ноябрь 2019), касающихся мобильных роботов, подводные не упоминаются. В зависимости от задания, назначения и состава полезной нагрузки подводный робот может вести съемку или манипуляции: обследование подводных трубопроводов (Autonomous Pipeline Inspection), уничтожение морских мин (Single Sortie Detect-to-Engage), строительство и техническое обслуживание (IMR services, Intervention) в морской нефтегазодобыче.
Образовательная подводная робототехника
С начала 2000-х робототехника и подводная робототехника в частности, приобрели широкую популярность в качестве образовательной технологии, позволяющей обучать школьников и студентов по различным техническим направлениям (программирование, схемотехника, конструирование) и дисциплинам (гидроакустика, приборы, навигация, обработка сигналов, компьютерное зрение, манипуляторы и др.).
Автономные подводные аппараты используются для мониторинга состояния подводных линейных сооружений (трубопроводы, кабельные линии), для картографирования поверхности дна и проведения научных исследований на большой площади. Большинство автономных аппаратов выполняется в виде торпеды, чтобы уменьшить лобовое сопротивление воды и тем самым увеличить длительность работы под водой на одном заряде батарей.
Также создаются гибридные системы, т.к. автономные аппараты, которые можно подключить кабелем для подачи питания и получения изображения с камер и данных с датчиков в режиме реального времени. Предполагается, что в ближайшие 5 лет AUV вытеснят ROV при работах на шельфе и обследовании трубопроводов, т.к. для работы с ROV требуется судно с динамическим позиционированием, которое может обходится до 250000 долларов в день, при этом работа промышленных AUV обходится в 30000 долларов в день [7]. Но для такой замены необходима мощная вычислительная бортовая система, производительная видеосистема, мощные и ёмкие аккумуляторы, точные датчики и сонары, а также разработка алгоритмов, которые смогут выполнять все те задачи в автономном режиме, которые выполняет оператор ROV в телеуправляемом режимхе.
Цзяолун» — китайский беспоплавковый глубоководный обитаемый аппарат. За период с 31 мая по 18 июля 2010 года совершил 17 погружений в Южно-Китайском море, самое глубоководное из которых — на глубину 6759 метров. Это событие сделало Китай пятой страной после США, Франции, России и Японии, обладающей современными технологиями погружений на глубину более 6500 метров.
FNRS-2 был первым батискафом, созданным Огюстом Пиккаром, Швейцария. Работа по созданию батискафа началась в 1937 году и была прервана Второй Мировой войной. Батискаф был достроен в 1948 году. Назван в честь бельгийского фонда национальных научных исследований (Fonds National de la Recherche Scientifique).
Фактическое строительство FNRS-2 велось в 1946-1948 годах. Батискаф был повреждён во время морских испытаний в 1948 году возле островов Зеленого Мыса.
На испытания в открытом море батискаф FNRS-2 отправился на 3500 тонном бельгийском судне Scaldis. Однако, кран Scaldis был недостаточно мощным, чтобы вытащить из воды FNRS-2 с заполненными бензином поплавковыми цистернами. Было успешно совершено беспилотное испытательное погружение на 1400 м, но из-за технических проблем не удалось опустошить поплавковые цистерны от бензина. Было принято решение отбуксировать FNRS-2 обратно в порт, но батискаф побило волнами о борта судна и возникла течь бензина из поплавковых цистерн. После обнаружения протечки бензин был слит в море, а FNRS-2 поднят на борт судна. Дальнейшие испытания были свёрнуты из-за отсутствия средств на починку.
Мир-1 и Мир-2 — два советских и российских научно-исследовательских глубоководных обитаемых аппарата для океанологических исследований и спасательных работ. Основные идеи по конструкции аппарата, устройству его отдельных систем, узлов, элементов, по комплектованию научного и навигационного оборудования принадлежат И. Е. Михальцеву, его заместителю А. М. Сагалевичу и главному инженеру проекта от финской судостроительной компании Саули Руохонену, возглавлявшему группу финских инженеров и техников, принимавших участие в строительстве аппаратов. Глубоководные аппараты изготовлены в 1987 году финской компанией Rauma-Repola Oceanics, причём контракт на создание аппаратов был подписан 16 мая 1985 года, а приёмо-сдаточный акт — 17 декабря 1987 года, после успешных испытательных погружений в Ботническом заливе и в Атлантическом океане на максимальную глубину 6170 метров («Мир-1») и на глубину 6120 метров («Мир-2»). Огромное значение для научных исследований имеет рабочая глубина погружения «Миров» — 6000 метров, благодаря чему эти аппараты могут достигать глубин, на которых расположено 98,5 % дна Мирового океана. Стоимость постройки каждого аппарата в 1987 году составила 100 млн. финских марок (17 млн. евро).
Автономные аппараты вначале использовались в основном для военных целей, в частности, для поиска, опознавания и уничтожения мин, имитации подводных целей, в качестве самонаводящегося оружия, а также для подледных исследований. В дальнейшем АНПА стали использоваться главным образом как информационные роботы, которые могут успешно решать исследовательские задачи по изучению Мирового океана.
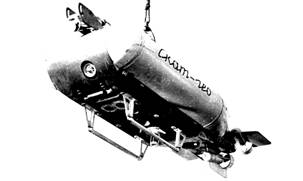
АНПА «Скат-гео». Создан по заказу ЦНИИГАиК в 1976 г. на основе АНПА «Скат» – первого в стране экспериментального АНПА с программным управлением и гидроакустической навигацией для решения исследовательских задач на шельфе. Испытания и опытные работы проводились на геодезиическом полигоне в Белом море (1978). После модернизации в 1991-1992 г.г. использовался совместно с ТПА «Макс-2» для биологических исследований на Тихоокеанском побережье Дальнего Востока.

Глубоководный обзорно-поисковый робото-технический комплекс «Лортодромия». АНПА «Л-2» во время испытаний в Филиппинском море (1980). Создан на основе модульной технологии, унификации элементов бортовых систем, преемственности при реконфигурации структуры. В 1982-1983 г.г. в комплексе с буксируемым аппаратом использовался в работах по детальному обследованию района катастрофы АПЛ «К-8» и северной Атлантике, при обследовании района гибели южно-корейского пассажирского самолета вблизи о.Сахалин. Следующая глубоководная операция состоялась в 1987 г., когда с помощью аппарата «Л-2» производилось обследование АПЛ «К-219», потерпевшей аварию в Саргассовом море вблизи Бермудских островов. Весной 1989 года глубоководный комплекс, включая аппарат «Л-2», использовался для обследования АПЛ «Комсомолец», затонувшей в Норвежском море.
Малоразмерный ТНПА «Чилим» (2014) – предназначен для решения специальных задач, поиска и уничтожения опасных подводных объектов в прибрежнх морских акваториях. Проект выполнен при научно-техническом сотрудничестве с ФГУП «Российский Федеральный Ядерный Центр – Всероссийский НИИ технической физики имени академика Е.И Забабахина» (РФЯЦ-ВНИИТФ, г. Снежинск). На базе ТНПА «Чилим» создан гибридный глайдер «Монитор» с гидравлической системой регулирования плавучести.

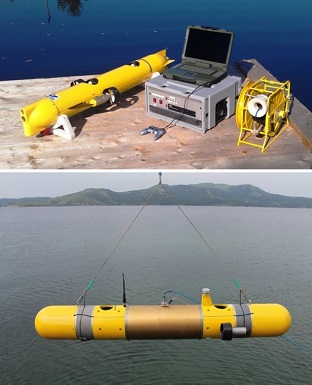
Робототехнический комплекс «МТ-2012» (Галтель) – предназначен для выполнения поисково-обследовательских работ, охраны подводных акваторий, инспекции и контроля инженерных инфраструктур на глубинах до 300 м. Комплекс содержит два автономных аппарата (АНПА), один телеуправляемый аппарат (ТНПА) и комплект навигационного, вспомогательного и обеспечивающего оборудования.